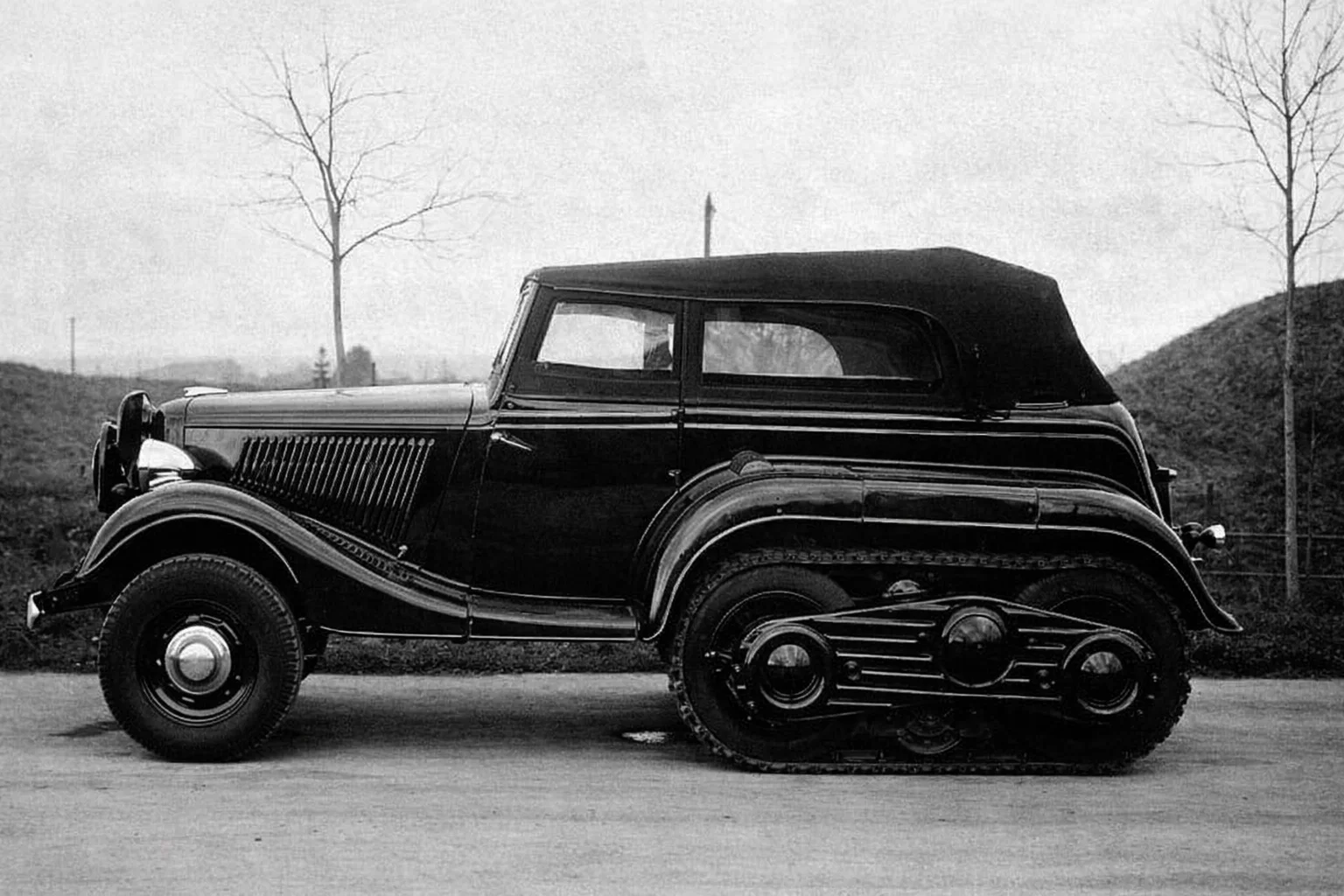
The second half of the 1930s in the USSR was not only an era of industrial giants, but also a persistent struggle against impassability. The army, which was developing the vast expanses of the country, needed vehicles capable of moving where the roads ended. At the Scientific Automotive and Tractor Institute, this problem was solved within the framework of the "V" direction - "all-terrain vehicles." It was here in 1937 that one of the most elegant and at the same time complex projects of its time appeared - the NATI-VM half-track vehicle. According to the plan, it was supposed to be a universal solution for the highway in summer, slush in autumn and snowy virgin land in winter.
The design team under the leadership of A.N. Ostrovtsov, which included B.V. Shishkin, A.V. Vasiliev and V.F. Rodionov, took the mass-produced GAZ-M1 passenger car as a basis. However, the similarity with the "Emka" was limited only to the original chassis. The main idea was multi-mode. Under normal conditions, the car remained wheeled, with a 6×4 configuration and dual rear wheels. During the period of impassability, rubber-metal tracks were installed on the rear axle, turning the car into a half-track all-terrain vehicle. In winter, the front wheels were replaced with skis, while the rear part retained the tracked drive - a kind of snowmobile was assumed.
The project did not arise in isolation. Specialized half-track tractors were already used in Germany, and the M2 Half-Track family of vehicles with a permanent tracked propulsion unit was being formed in the USA. However, the Soviet concept was fundamentally different: if Western models were created as specialized vehicles "from scratch", then NATI-VM was a radical alteration of a serial road car. It was not an independent organism, but a transformed chassis.
To work with the tracked propulsion unit, the design of the "Emka" was significantly strengthened. The standard rear axle was replaced with a unit from the GAZ-AA truck, and a reduction gear from the three-axle GAZ-AAA was included in the transmission to increase traction capabilities. The frame was reinforced, and the torque transmission to the rear rollers was carried out through chain gears - a solution borrowed from earlier developments of the institute.
The tracked mechanism was complex. Two dual wheels performed the functions of driving wheels, and supporting rollers were placed above and below. The rubber-metal belt had an internal ridge that passed between the slopes and prevented convergence. The engagement was frictional - exclusively due to friction.
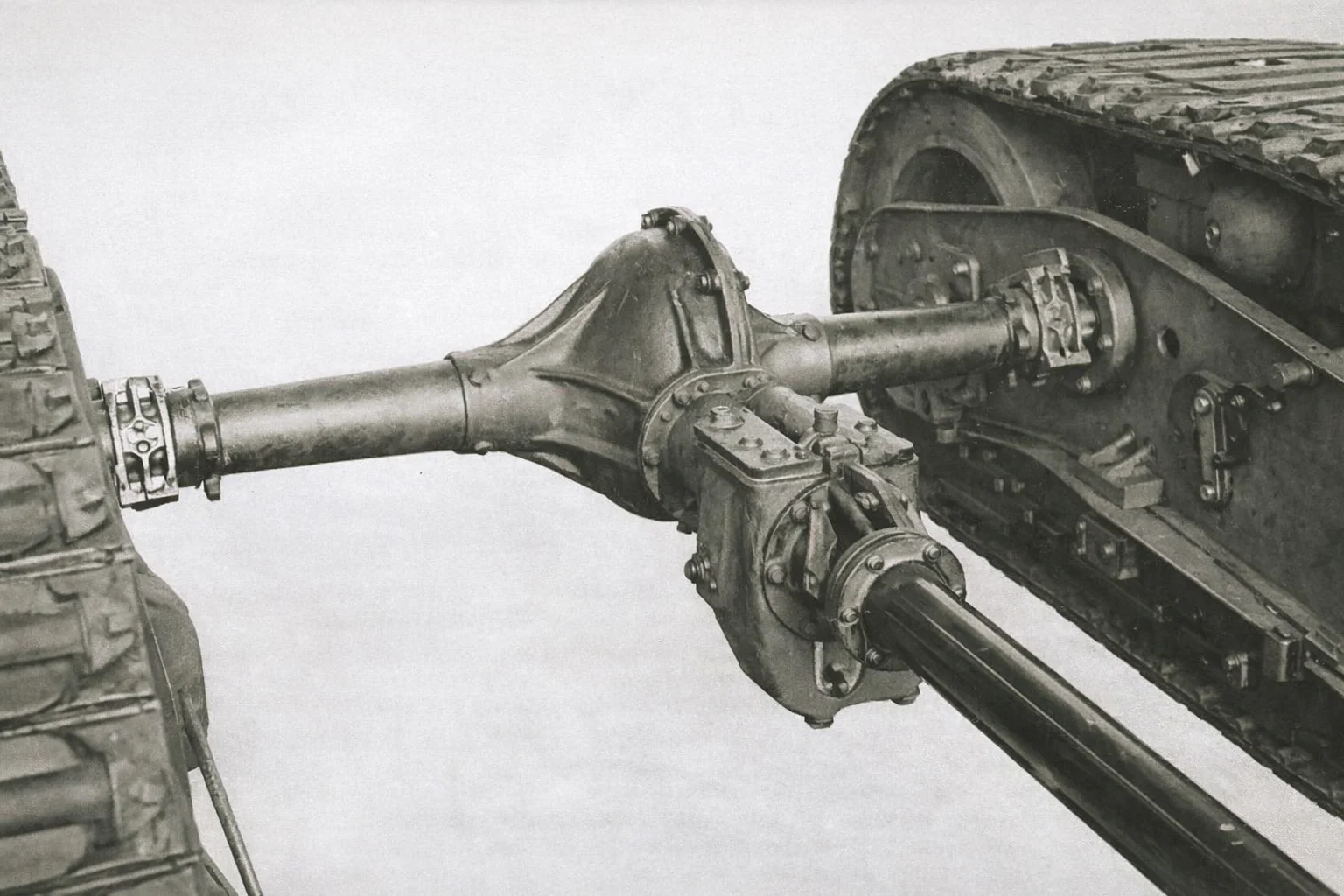
It was this scheme that laid down the fundamental limitations. In the "rubber-steel" pair, the coefficient of friction decreased sharply when icing or contamination with snow porridge and water. The contact area overheated, which accelerated the aging of the rubber, and sand and ice acted as an abrasive. The reliability of the entire structure depended on the stability of friction - a parameter that turned out to be extremely unstable in real conditions. The front axle was made tubular and the track was widened, improving stability.
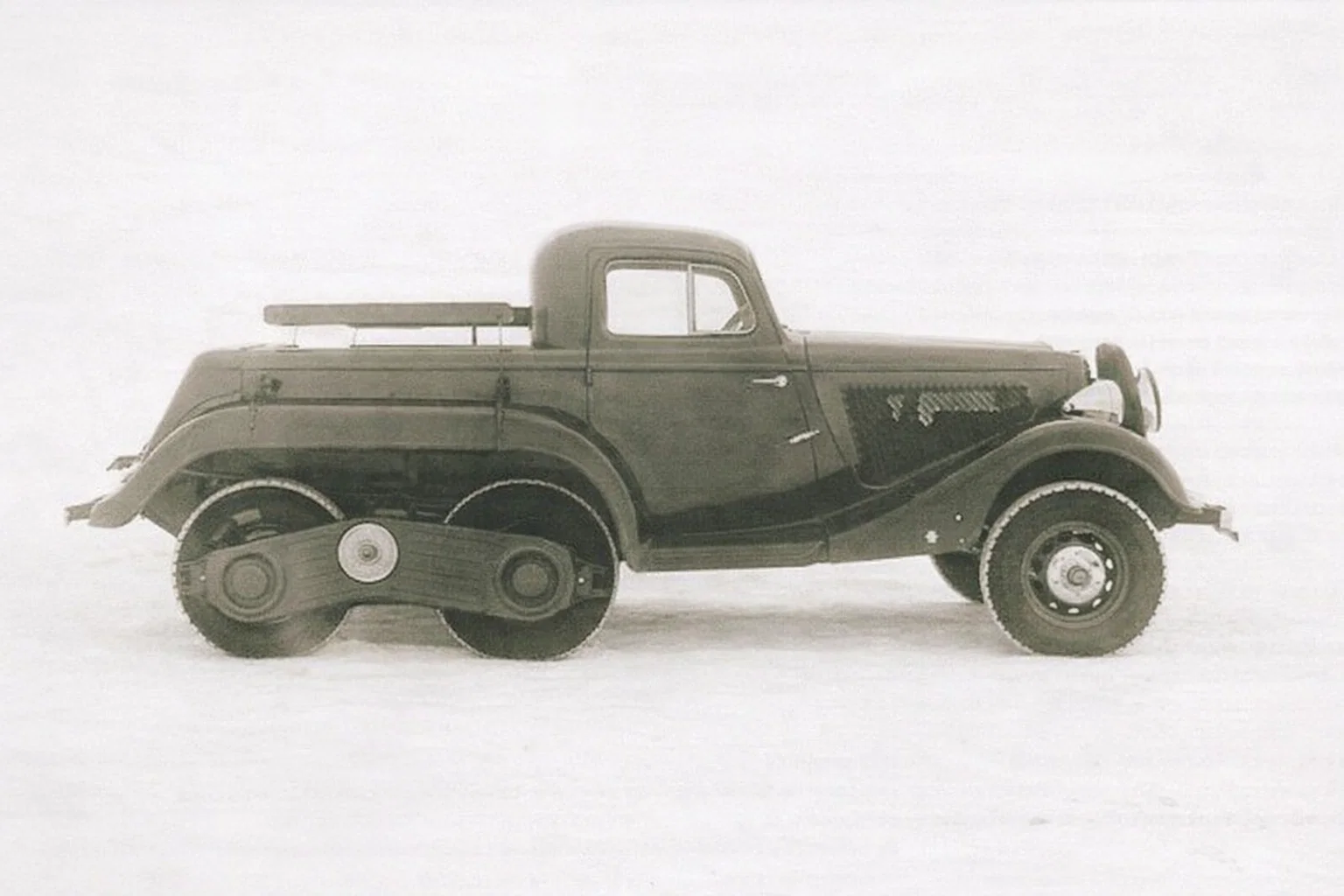
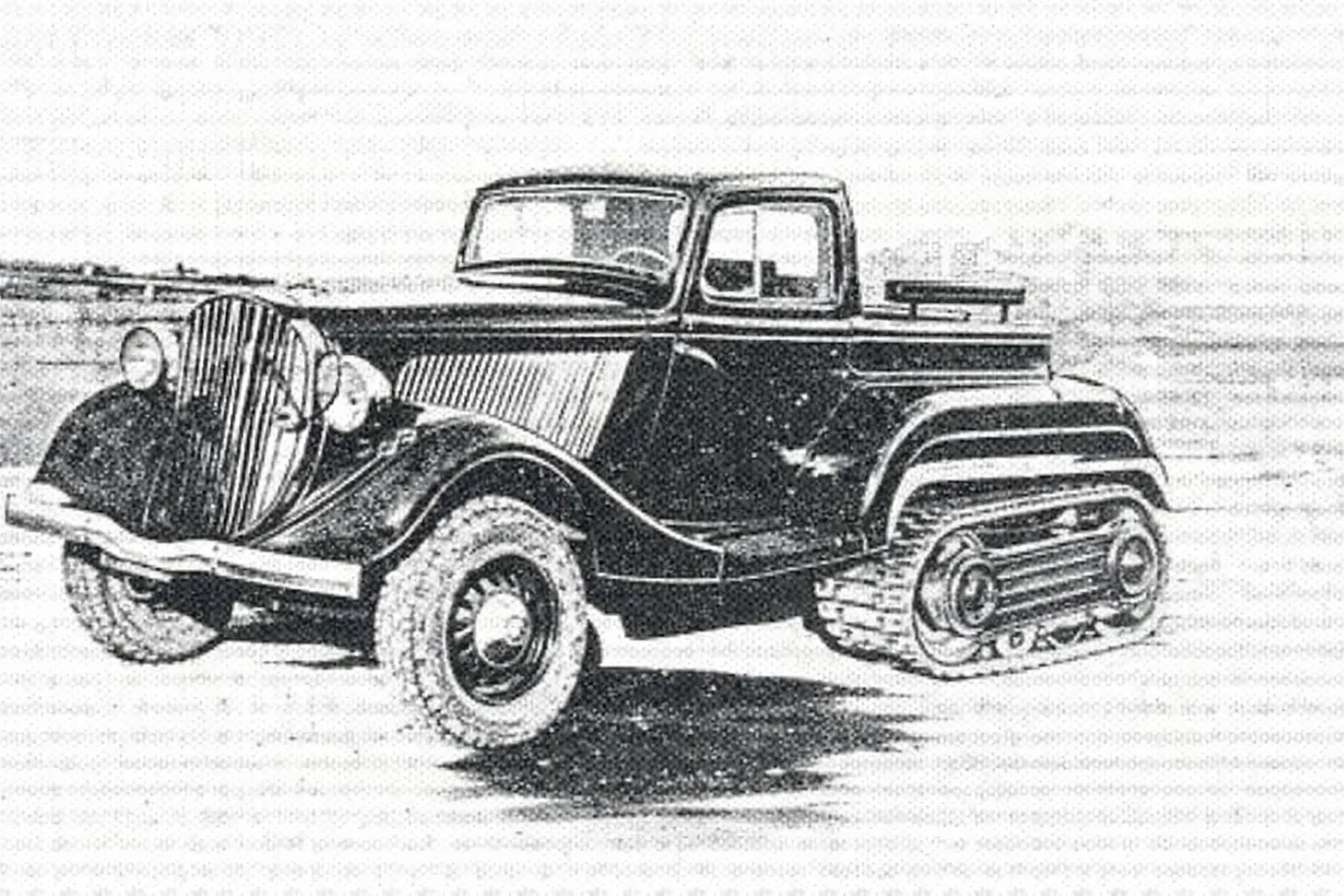
Two versions of the car were created. The first is a five-seater open phaeton for the command staff, with folding seats, folding tables and a luggage compartment. The second is a pickup truck with a closed cab with a payload of 500 kg; folding benches for six people were provided in the body. The dimensions exceeded five meters in length and more than two and a quarter meters in width. At the same time, the specific pressure on the ground was about 0.3 kgf/cm² - a decent indicator for movement on snow and mud.
However, the economic side turned out to be no less difficult than the technical one. The cost of NATI-VM significantly exceeded the price of the basic GAZ-M1, the number of nodes and parts increased by dozens of positions. The installation and dismantling of the tracks required time and qualified personnel, which excluded a quick change of mode in the field. As a result, the car cost about one and a half to two times more than the "Emka" while simultaneously reducing the service life of the units.
Tests conducted from December 1937 to July 1938 revealed the contradictory nature of the project. On wheels, the car accelerated to 60 km/h, on tracks - up to 48 km/h. Patency in the autumn-winter period was recognized as significantly higher than that of the then existing three-axle vehicles with increased patency. But when driving on snowy virgin soil, constant operation in first gear was required, which overloaded the engine.
Fuel consumption showed a sharp contrast: 32 liters per 100 km on the highway versus 115 liters in the snow. An additional problem was the sticking of wet snow in the frame of the propulsion unit and on the tracks, which could completely stop the car. The frictional principle of engagement led to wheel slippage and accelerated wear - chronic shortcomings of such systems.
There was also a thermal limitation. With an engine power of about 50 hp, the specific power in the tracked mode decreased to 7-8 hp per ton. The car moved slowly, but at high speeds, which worsened cooling and reduced reliability.
Ultimately, the project turned out to be too complex and not stable enough for real operating conditions. More rational solutions were already appearing on the horizon - all-wheel drive GAZ-61 and GAZ-64, devoid of a hybrid transformable propulsion unit. Their concept of permanent all-wheel drive turned out to be simpler and technologically more viable.
NATI-VM remained an important but dead-end stage in the evolution of Soviet all-terrain vehicles. An attempt to create a universal mechanism for all types of off-road conditions by adapting a serial chassis demonstrated engineering courage, but faced the technological limit of the era. The brief conclusion of the testers - "operation in summer on tracks is impractical" - became the final assessment of an ambitious but short-lived experiment.
Read more materials:
- 4WS: Japanese classics and European Renaissance
- Modern disposable engines: myth or reality?
- How Chinese cars are seizing the domestic market
Комментарии