Imaginemos la situación: se adquiere un Porsche Cayenne moderno, un Mercedes-Benz Clase S o un BMW Serie 7 actual. Se levanta el automóvil en un elevador, la vista se dirige al eje trasero y allí se encuentran las barras de dirección. Para el propietario desprevenido, esto parece algo revolucionario. El concesionario estará encantado de llamar al sistema una innovación ultramoderna del siglo XXI. Sin embargo, la idea en sí no es nueva: los fabricantes japoneses instalaron soluciones similares en los coupés de producción en la era de los radiocasetes.
Estamos hablando del sistema 4WS (Four-Wheel Steering): dirección en las cuatro ruedas. Las preguntas que plantea siguen siendo relevantes: ¿cómo lograron los ingenieros implementar el giro del eje trasero sin electrónica? ¿Qué principios físicos permiten que el automóvil literalmente se "desplace lateralmente"? ¿Y por qué la tecnología, que se desarrolló en la década de 1980, desapareció a principios de la década de 2000, para regresar dos décadas después en costosos modelos premium?

Si recurrimos a la historia, la idea misma de girar las cuatro ruedas se discutió a principios del siglo XX, aunque no se consideran aquí los equipos militares y las máquinas especiales. En el segmento de turismos civiles, los fabricantes de automóviles japoneses de mediados de la década de 1980 fueron los primeros en implementarla activamente. Se cree que el primer sistema mecánico masivo fue el 4WS del Honda Prelude en 1987. Los fanáticos del Nissan Skyline R31 pueden objetar: su sistema hidráulico HICAS apareció ya en 1985. Sin embargo, fue Honda quien implementó una profunda dependencia del ángulo de giro de las ruedas traseras con respecto a la posición del volante.
El diseño del 4WS de Honda sorprendió por su pureza de ingeniería. Desde la cremallera de dirección delantera, un eje cardán pasaba por debajo de la carrocería hasta la cremallera trasera, dentro de la cual había un complejo mecanismo planetario. Sin computadoras ni motores eléctricos, solo mecánica, capaz de funcionar con alta precisión y confiabilidad.
La física del funcionamiento del sistema dependía de la velocidad y el ángulo de giro del volante. Esencialmente, había dos modos.
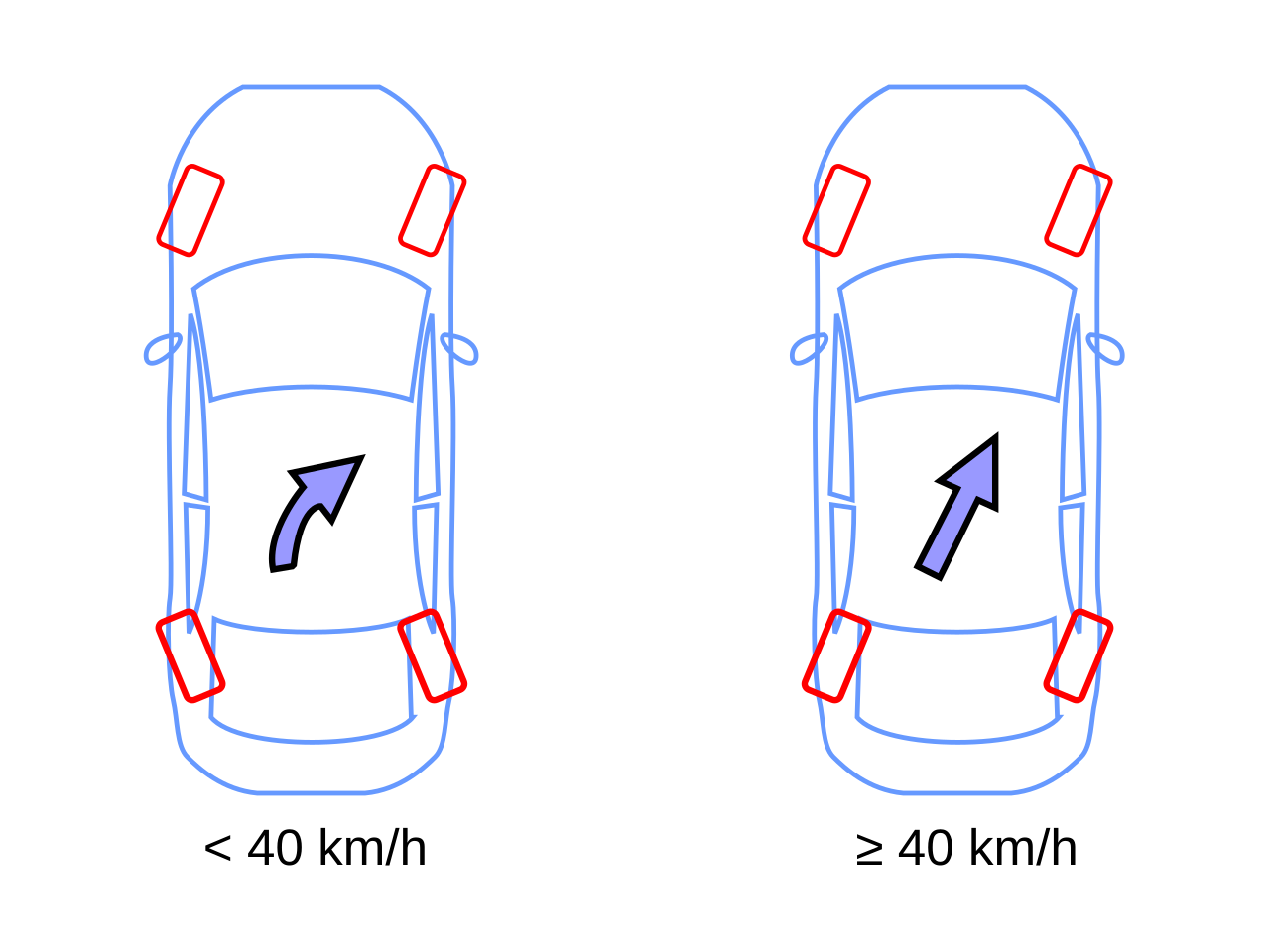
A alta velocidad, las ruedas traseras giraban en la misma dirección que las delanteras, generalmente entre 1,5 y 2 grados. Al cambiar de carril en la carretera, el automóvil no "se sumergía" con el morro en el carril adyacente, sino que se desplazaba en diagonal, manteniendo el paralelismo con las marcas viales. La carrocería se inclinaba menos y la estabilidad se sentía casi como sobre raíles.
Durante las maniobras de estacionamiento, la situación cambiaba: con un ángulo de giro significativo del volante, las ruedas traseras se desviaban en la dirección opuesta, hasta 5 grados. El radio de giro de un cupé grande se reducía en casi un metro. El automóvil parecía girar alrededor de su propio eje, lo que facilitaba las maniobras en espacios reducidos.
En la década de 1990, el sistema se extendió a diferentes marcas japonesas: se utilizó en el Mitsubishi 3000GT, el Nissan 300ZX y el Mazda 626. Sin embargo, a principios de la década de 2000, la tecnología prácticamente desapareció.
Hubo varias razones. Primero, el peso y el costo: los accionamientos mecánicos o las bombas hidráulicas aumentaban el peso del automóvil y encarecían la producción. En segundo lugar, el comportamiento inusual: al estacionar, la parte trasera podía desplazarse bruscamente, lo que para los conductores no preparados se convertía en estrés y provocaba daños. En tercer lugar, el desgaste. Con el tiempo, aparecían holguras en las barras y los mecanismos, y el eje trasero comenzaba a reaccionar de forma menos predecible, provocando "bamboleo" en las irregularidades.
Después de aproximadamente dos décadas, el sistema regresó, ahora bajo el nombre de Active Rear Steering. La razón es simple: los automóviles modernos han aumentado significativamente en tamaño y peso. Si en la década de 1990 un BMW Serie 7 pesaba alrededor de 1,7 toneladas, modelos como el BMW X7 o el Mercedes-Benz EQS alcanzan las 2,5-3 toneladas con una longitud de más de cinco metros. Maniobrar un automóvil así sin sistemas auxiliares es difícil.

Las soluciones modernas ya no utilizan un eje mecánico a través de toda la carrocería. En la suspensión trasera se instalan compactos electromotores-actuadores controlados por electrónica. La computadora de a bordo analiza la velocidad, el ángulo de giro del volante y los datos de los sistemas de estabilización y determina en qué ángulo girar las ruedas traseras. En el nuevo Mercedes-Benz Clase S, el ángulo de giro en contrafase puede alcanzar los 10 grados, lo que permite que un sedán grande gire casi como un automóvil de la clase de golf.
Hoy en día, el 4WS resuelve principalmente el problema de la compensación de dimensiones y peso. La tecnología, que alguna vez se percibió como un atributo deportivo, se ha convertido en una herramienta para aumentar la maniobrabilidad de los automóviles pesados. Al mismo tiempo, la complejidad del diseño y el costo de los componentes siguen siendo significativos: reemplazar un electroactuador trasero en un Mercedes moderno puede costar entre 300 y 400 mil rublos.
La evolución de la dirección en las cuatro ruedas demuestra la ciclicidad de la ingeniería automotriz. La idea, implementada en la década de 1980 con mecánica pura, desapareció debido al peso, el precio y el desgaste, para regresar en la era digital en una encarnación tecnológica diferente. Ahora ayuda a hacer frente a la física de los automóviles grandes y pesados, confirmando que incluso las soluciones más audaces pueden tener una segunda vida.
Lea también los siguientes materiales:
- Por qué los faros redondos fueron un estándar durante mucho tiempo
- Michelin: el camino de la fábrica a la guía gastronómica
- Siete coches con un motor realmente extraño
Комментарии